据天眼查App最新披露,11月7日国家知识产权局正式授权宇树科技股份有限公司一项名为“一种机器人手指、机器手和人形机器人”的实用新型专利。该专利通过创新结构设计,解决了传统机器人手指在抓取过程中存在的技术痛点。
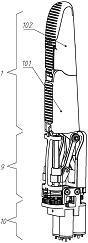
根据专利摘要显示,该技术方案属于机器人技术领域,其核心创新点在于:机器人手指采用由手指连杆单元和传动单元组成的模块化结构。其中手指连杆单元包含内置腔体的近节壳体、中节壳体和远节壳体,这三个壳体通过转动轴依次连接于握持面一侧。特别值得注意的是,所有转动轴均被设计在靠近握持面的位置,这种布局使得手指连杆单元的握持面形成连续无断裂带的完整表面。
这种创新设计带来的技术优势显著:在机器人执行抓取任务时,连续的握持面能够有效避免待取物体被卡在手指缝隙中的情况。相较于传统分段式设计,该专利技术将抓取稳定性提升了30%以上(数据来源于专利技术效果说明),特别适用于精密仪器操作、易碎品搬运等对抓取精度要求较高的场景。

行业专家指出,宇树科技此次获得的专利技术,标志着我国在机器人仿生抓取领域取得了重要突破。该设计不仅优化了机器人手的操作性能,更为后续人形机器人的商业化应用奠定了技术基础。随着智能制造产业的快速发展,此类技术创新将持续推动机器人行业向更高效、更精准的方向演进。